Lidar holds the promise of making autonomous vehicles safer by improving navigation and enabling faster, better decisions. Lidar is an acronym for light detection and ranging, and, as its name implies, is a remote sensing method using laser light to measure distance to an object. A flash or scanning lidar provides a three-dimensional point cloud of the surroundings.
Until now, lidar navigation systems relied on a first-generation pulsed technology called time-of-flight (ToF) lidar. Pulsed ToF lidar emits powerful pulses of light to detect obstacles in its path by measuring the round-trip time of photons that bounce back from objects.

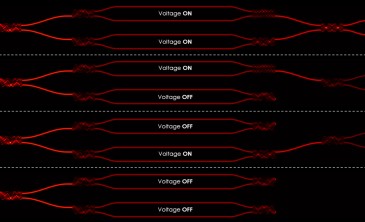
Principle of ToF lidar operation during nighttime

Operation of ToF lidar in bright sunlight and in the presence of other lidars
Time-of-flight lidar works great at night, but during bright daylight photons from the sun interfere with the signal creating noise in the received signal. And, with multiple ToF lidars operating in the vicinity, the ToF system could become completely incapacitated by receiving pulses from other lidar systems. To remedy this issue, some ToF lidar vendors are starting to introduce coding techniques by splitting the transmit signal into multiple pulses. However, range performance is proportional to peak power in these systems and splitting the available energy into multiple pulses causes range performance to drop.
Eye safety concern
Moreover, today’s time-of-flight lidar systems operate at 850 nanometer and 905 nanometer wavelengths, which are very close to the visible spectrum.

Commonly used lidar laser wavelengths plotted on top of terrestrial solar irradiance and visible spectrum
Eye safety is a big concern and limits the amount of power and the range of time-of-flight systems. In addition, there is significant solar irradiance in the 850 to 905 nanometer band causing interference during daylight. A far better wavelength is 1550 nanometers, where eye safety is 40 times better and there is less interference from the sun.
It’s inevitable that an evolution to coherent detection methods will occur for lidar as it did for radar. Rather than relying on simple pulses, a coherent detection method emits and relies on a low-power frequency chirp.

This diagram illustrates the principal operation of a FMCW lidar. The low power transmit chirp (green) is reflected off an object. The frequency shift between the returning chirp (blue) is proportional to the distance and velocity of the object. An up and a down chirp are used to resolve for both values, distance and velocity.
The reflected chirp contains the distance of the measurement point in the form of a frequency shift. If the measurement point also has a radial velocity, the reflected chirp adds a doppler frequency shift.
Using an up and a down chirp allows coherent lidar to instantaneously resolve both the range and velocity of each pixel. Time-of-flight lidar cannot resolve velocity instantaneously. Velocity is a very important attribute of people and objects surrounding a vehicle.
Frequency modulated continuous wave of the future
Coherent lidars, based on the frequency modulated continuous wave, or FMCW, technique allow much higher detection sensitivity and accuracy. For FMCW lidar, the signal-to-noise ratio is proportional to the total number of transmitted photons and not to the peak laser power. Since FMCW lidar has more than 10 times greater sensitivity, it can transmit at less than 1,000 times lower average power than pulsed time-of-flight lidar.
The photonic circuitry of FMCW lidar mixes a portion of the outgoing coherent laser light with the received light. This provides a unique “unlock” key, effectively blocking any background radiation or lidar interference.

This diagram illustrates the concept of coherent amplification. The local oscillator, branched off from the blue transmit signal, interferes constructively with the weak purple receive signal and generates a new green strong beat frequency signal. The strong beat frequency signal is then fed back into and detected by the photodetector.
In addition, the coherent mixing of the local oscillator and the receive signal provides an amplified beat frequency through constructive interference before it’s detected by a balanced photodetector. The range is extracted by running a fast fourier transformation on the received waveform.
Advantages of FMCW vs ToF
There are several other advantages worth highlighting using FMCW vs. ToF lidar:
The maximum ranging distance of ToF is limited by eye-safety standards. In an autonomous driving scenario, it is necessary to detect low reflectance objects (e.g., a dark object lying on the road ahead) at distances of 200m and more in order to plan an evasive maneuver or simply brake. None of the near-infrared (NIR) ToF systems in the market today advertise a 200m detection for a 5% reflective object.
It is expected that in the future, lidar sensors will be as widespread as radar sensors are today. However, ToF lidars are prone to multi-system interference. The detectors may detect double pulses or simply saturate in the presence of other lidars. On the other hand, when implementing FMCW correctly, this form of lidar is virtually interference free as it only allows its own coherent light to filter through the detector.
And, having velocity information with every pixel (4D sensing) provides an autonomous system with a clearer and safer perception of its environment. An FMCW measurement returns radial velocity with every pixel, effectively providing a 4D image. On the other hand, in ToF measurement systems, pixel velocity information requires subsequent measurements which often are difficult to extract due to motion blur.
In addition, and this is probably by far the most important advantage of FMCW, the integration of all components on a single photonics chip in order to achieve the cost targets to democratize the technology is only possible with FMCW in the short-wave infrared (SWIR) band. For one, the on-chip waveguides are transparent and low loss at these wavelengths (e.g., 1550nm). And secondly, the laser peak power levels are in the 100mW range vs. hundreds or thousands of watts with ToF. The photonics integration also enables solid state beam steering using optical phase arrays.
There are over one hundred lidar companies today and counting. Fewer than 10 are focusing on FMCW. And there is only one that has demonstrated a silicon photonics chip to date.

SiLC’s silicon photonics integrated FMCW lidar chip provides depth and velocity data of every measured pixel. On the left is a camera image of a scene, followed by a depth and a velocity point cloud. Images courtesy of SiLC Technologies.
Using their silicon photonics heritage and proprietary process technology, the team at SiLC Technologies is working on a single-chip approach integrating the laser, the coherent detection engine, and the detectors onto one chip.
Written by By Ralf J. Muenster, VP Business Development & Marketing, SiLC Technologies, Inc.