“Seven Minutes of Terror.” The most challenging phase of the MARS Perseverance mission is the entry, descent, and landing (EDL) – a short and intense seven minutes when the spacecraft enters into the Martian atmosphere at 12,500 miles per hour and safely decelerates down to zero as it touches down on the surface. Perseverance completes this phase autonomously, and its success takes eleven minutes and twenty-two seconds to radio back to Earth.
The Mars Perseverance Rover includes a total of twenty-three cameras used in the engineering, EDL, and science camera systems. EDLCAM systems aimed to capture EDL events in more detail than in previous missions. The camera system took full-color video during the vehicle’s descent through Mars’ atmosphere to the surface. The images captured on the way down help Perseverance’s mission planners select the rover’s initial drives. The EDLCAM system consists of a total of seven cameras: Parachute Uplook Cameras (PUC), Descent-stage Downlook Camera (DDC), Rover Uplook Camera (RUC), Rover Downlook Camera (RDC), and the LCAM. The LCAM was dedicated to providing critical image data to the Lander Vision System (LVS) required for Terrain-Relative Navigation – an onboard computer analyzed the images to compare them with a map so that Perseverance could autonomously choose the safest landing site relative to the rover’s position during the descent. It also monitored the deployment of the parachute during the parachute descent phase of EDL.
Challenge: improving knowledge of system performance
The critical challenge for the Mars 2020 Mission EDLCAM and LCAM systems was to improve knowledge of EDL and LVS system performance using a video imaging system to capture key EDL events (including parachute deployment, skycrane deployment, rover touchdown, and lander rocket plume dynamics) and using image capture to help autonomous TerrainRelative Navigation. The solution selection process comprised of qualification of commercial off the shelf (COTS) hardware emphasizing cost and ease of system integration.
EDLCAM cameras

Image acquired during Perseverance’s descent to Mars, using its Parachute Up-Look Camera A. Image Credit: NASA and JPL-Caltech
A vital requirement of the EDLCAM system was that it would not interfere with the flight system during EDL. The camera system design could not compel changes to the flight hardware or software systems inherited from the Mars Science Library (MSL) Curiosity rover. The camera systems’ minimum frame rate requirements were 30 frames per second (fps) to capture images of the parachute. The three PUC cameras were to start capturing images at a frame rate of 75 fps prior to parachute deployment and drop the frame rate to 30 fps after thirty seconds until the backshell separation about ninety-eight seconds later. Each PUC was expected to take approximately 5,190 images – a total of 15,750 for the system. The RDC camera system was to start capturing images just before heatshield separation and continuing through touchdown on the surface of Mars. The RDC captured images at 30 fps for approximately 260 seconds for a total of about 7,800 images. The RUC camera system was to start capturing images just prior to the rover separating from the descent stage and continuing through rover touchdown on the surface of Mars. The RUC captured data at 30 fps for approximately 140 seconds for a total of about 4,200 images.
LCAM Camera
The LCAM camera requirements include a field of view of 90-degree by 90-degree, an array resolution of 1024 x 1024 pixels, and a globalshutter sensor. The camera system solution also needed to have a frame latency of less than 100 milliseconds between the camera image trigger and the last pixel output of the image, a frame rate of up to 2 Hz, and an SNR of greater than 80:1 with approximately one millisecond exposure time under the illumination conditions of the Mars environment.
Solution: FLIR Systems cameras with onsemi sensors

PYTHON family of CMOS image sensors
The Perseverance mission teams selected cameras from the FLIR Systems Chameleon3 family of cameras for the EDL camera systems. The solution chosen for the PUC, RUC, RDC, and LCAM camera systems includes sensors from the onsemi PYTHON family of CMOS image sensors. The EDL engineers chose the PYTHON-based cameras from FLIR because of their global shutter operation, small optical format, versatility, read-out speed (full frame rate, and quadratic speed increase reading out smaller regions of interest). Within the Chameleon3 camera product family, the PYTHON-based cameras offered the highest frame rates. The correlated double sampling (CDS) support in global shutter mode provides reduced noise to single-digit noise performance and increased dynamic range to retain image detail in high-contrast situations. The PUC, RUC, and RDC camera systems use PYTHON 1300 image sensors.
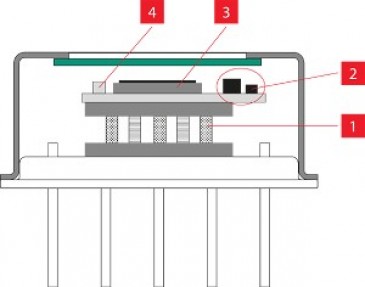
The LCAM uses a monochrome PYTHON 5000 global-shutter CMOS image sensor with a pixel array of 2592 by 2048 by 4.8 µm pixels and on-chip 8-bit or 10-bit digitization with a frame rate capability of up to 100 frames per second.
The LCAM system solution selected for Perseverance derived from successful deployment as the Vision Sensor System (VSS) camera on the NASA Goddard Space Flight Center (GSFC) Restore-L Mission and the P50 camera on the Naval Research Laboratory (NPL) Robotic Servicing of Geosynchronous Satellites (RSGS) Mission that both used the ON Semiconductor PYTHON 5000 image sensor.
Result: First-ever color video of touchdown
The next-generation imaging system of the Perseverance rover improved the operational capabilities of the Mars 2020 mission by providing the first-ever color video of touchdown on the Martian surface. The EDLCAM video of crucial entry, descent, and landing events successfully documented the mission systems’ performance. It will serve to instruct the design for EDL systems in the future. Likewise, the success of the Lander Vision System LCAM to capture Martian surface images to assist Terrain-Relative Navigation will facilitate more targeted landing capabilities for future missions to Mars. More than 1,300 images and video captured by these camera systems are available for viewing on the Mars 2020 mission Perseverance Rover website.
Written by Danny Scheffer, Product Line Manager, Industrial and Commercial Solutions Division, onsemi