













3D vision is becoming an unavoidable technology – and that’s a good thing. Advances in technology and reduced cost now make 3D vision a technology that can be applied to all sorts of applications. General quality inspections, validations, verifications, sorting, medical, reverse engineering, and quality control are now using 3D vision technologies to enhance their productivity, efficiency, and quality at a lower cost.
Fifteen years ago, many industries used only 1D (line scan) and 2D (area scan) to achieve depth information based on software, lighting, and complicated arrangements. At that time 3D systems did not deliver, they cost too much or were unreliable. Measurement results from 3D inspection were often inaccurate and not repeatable.
All this has changed as 3D technologies have become low-cost, very reliable, repeatable, and easy to implement. The trend of using 3D vision systems for inspection started more than a decade ago and is still growing strong as the technology is proven in a wide variety of demanding applications. Advancements and improvements in sensor quality and speed, embedded systems, FPGAs, lasers, optics, and smart systems have enabled and enhanced the world of vision by routinely taking advantage of 3D vision. While 2D is still extremely popular, 3D now has its place alongside 2D vision almost everywhere.
3D vision is a vast area and there are so many technologies available today. It is now used everywhere, in applications for the medical industry, science, automotive, food production and sorting, and can be found on production floors, as well as for automation, security, and quality control. Technologies such as modern electronics and artificial intelligence (AI) have enabled systems to become more powerful at reasonable prices.
In this article, I will cover four popular 3D vision systems technologies:
- Laser triangulation
- Structured light
- Stereoscopy
- Time of Flight (ToF)
Selecting the right technology for every application
The choice of technology is often decided by the application. Equally important are the inherent characteristics required for a successful application, characteristics like speed of execution, accuracy, repeatability and of course the cost of integration. As companies being to explore implementing 3D vision systems, here are the pros and cons they should consider.
1. Laser triangulation
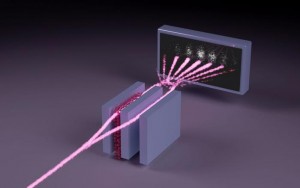
Laser triangulation has been around for decades and this technology is still widely used. It can offer high resolution, repeatability and accuracy with simple setups at very low cost. The principle of this technology is to project a laser pattern (or stripe) onto an object and observe at an angle the reflected diffusion of the laser from the object. This principle is called laser triangulation. Very often, but not in all cases, a single laser stripe is used to simplify the systems.

The laser stripe is projected on an object and is imaged on an area sensor. After determining the position of the laser stripe on the area sensor, the profiler gives the information for the lateral (X axis) and depth (Z axis) created by the optical triangulation of the laser stripe. The third axis (Y) is obtained by scanning the object. By scanning any object, we obtain a volumetric image (X,Y,Z) in space relative to the camera or profiler.
Let us enumerate the pros and cons of laser stripe triangulation scanners.
PROS:
- Low cost. Laser triangulation 3D systems remain relatively low cost because laser profilers use commercial parts that are off-the-shelf. The overall system is also simple to use and implement. The improvements in recent years of CMOS imagers have made this technology very strong, reliable, and fast. In addition, the processing speed and power of FPGAs have helped a lot in lowering integration.
- Easy to use. Laser triangulation profilers are usually very easy to use and setup. No special arrangements such as lighting are required.
- Fast and robust. With the advancements of high speed CMOS sensors combined with FPGA and powerful embedded systems, speed and reliability are more easily attained.
- Wide range of resolutions, from meters to micrometers. A wide range of optical arrangements is possible with this technology without having to change all the processing architecture. Simply changing the mechanical and optical design to obtain diverse resolutions can scale from several meters down to 5 microns. Under 5 microns is also possible but increases the risk of getting the proper accuracy.
- Accuracy and repeatability. With proper calibration and good optics, mechanical and electronics design, accuracy and repeatable measurements are obtained easily relative to the overall cost.
- Easy to integrate. Because profilers are becoming more reliable and this technology is now very mature, users are not afraid to use it and willing to choose it as the preferred technology.
- Easy to expand. With a clever architecture, many processing blocks can be added to increase the power of the systems. AI is a clear example of added processing intelligence. Pixel processing and smart sensors are others.
- Can tolerate vibrations. By scanning, small vibrations can actually help to reduce the overall noise created by the speckle of the laser.
CONS:
- Occlusions. Because laser triangulation needs to look at angles, occlusions are often a problem. Occlusions are shadows created by the positioning angle of the profiler caused by the geometric triangulation. One solution is to use one or two lasers and two cameras, but this increases the cost.
- Specular reflections are the bane of all 3D systems. Many efforts have been made to correct specular reflection, but very few have succeeded. A specular reflection is similar to light being reflected on a mirror or a very shiny surface.
- Laser speckle. Inherent noise generated by the laser reduces the resolution of systems.
- Largely dependent on sensor performances. In this type of technology, the sensor is one of the most limiting parts for speed limitations and overall performance.
- Scene or object to inspect needs to be scanned to obtain a volumetric image of any object.
2. Structured light (phase shift and others)
Structured light is also a very popular technology and usually chosen for very high resolution applications requiring up to 1-micron resolution. Structured light can also be used to scan larger objects with lower resolution. There are many types of structured light 3D systems. Phase-shift is one of the most popular, random pattern projection is another. The principle of phase shift structured light for the creation of 3D volumetric image makes use of a projector with predetermined light patterns. The projector emits three or more images on the target object and an area scan sensor captures all of the images. By using a mathematical formula that takes into account all images captured, the system obtains a volumetric X,Y,Z measurement as a result. No scanning is required with this technology, only phase-shifting of the projection images.
PROS:
- Resolution can go down to sub microns. A well-designed system can produce a 3D volumetric image at sub-micron resolution for a very small scene. At the same time, this type of system designed accordingly can also produce a 3D volumetric image for large parts with lower resolution. Few technologies other than interferometry can produce such high resolutions.
- No need to scan for volumetric images (X-Y-Z). The camera or part does not have to be moved in order to get a 3D volumetric image. The volumetric images are obtained by projecting phase shifted patterns than can be either analog sine waves (many grey levels) or digital black and white patterns (only two grey levels). This is the choice of the system designers.
- Good for electronic inspections. Because this technology can go to down to 1-micron resolution, it is often used to inspect very small features not possible for other technologies. Small features such as BGA chips or semiconductors surfaces.
- Fast X-Y-Z volumetric image. A volumetric image is obtained quickly without scanning the object. This can be a huge advantage for applications where movement is not possible.
CONS:
- Specular reflections and ambient light. Specular reflection is a big issue with this technology. Of course, most vision systems are affected by specular reflections. Ambient light must be low because the computation of the volumetric 3D image is computed with grey levels. Ambient light can disturb or cause distortion.
- Projector must be of good quality. Projector defocusing (unless binary coded patterns are used) can usually degrade the results. The projector must be well adjusted, calibrated and focused on the entire scene.
- Occlusions requires several cameras and probably 2D camera + ring light. Occlusions is also a problem in these systems. A combination of several cameras can help solve that problem. Also, additional 2D lighting such as ring light is sometimes necessary to achieve the full inspection requirements.
- Vibrations need static scene for all pictures (four snapshots or more). Any vibration or movement can cause distorted 3D images giving bad geometric measurements.
- Need powerful processing units for heavy calculations. Several images must be stored and calculated together in order to obtain the 3D volumetric images. For a decent generation of images and measurements, this is possible only if the system has powerful processing units.
3. Stereoscopy
Stereoscopy is a very well-known and mature technology for the production of 3D images.
Stereoscopy uses image snapshots from two cameras at different angles. Combining the data of each of the images delivers a 3D (X,Y,Z) image.
PROS:
- One big advantage is that any two standard area scan cameras can be used to produce such a system. Usually the software will compute the resulting image.
- Snapshot. Can freeze moving objects. Although fast moving objects can produce fuzzy images, it is still possible to obtain a 3D image with movement of the scene.
- Good support in S/W packages. Since this technology is very mature, many software packages are available today.
- Good for traffic applications, like tolls and car classifications, and robot bin picking. Since many applications do not require high resolution but need 3D images, this technology can be interesting.
CONS:
- Illumination is important (ambient light can disturb). Since this is a combination of two 2D images, lighting and ambient light can distort the final result. Many software programs can compensate but few have succeeded for all applications.
- Poor Z accuracy. Does not give the possibility of high Z accuracy because usually scenes are big and far for this type of technology.
- Limited depth of field. Because we are working with 2D images, the focal plane is often very limited. We have the same problem with any 2D system.
- Low details in X,Y typically 1/10 compared to pixels. The computation of two 2D images to produce a 3D image will naturally decrease the X,Y resolutions. This is normal considering the necessary mathematical calculations.
4. Time of flight (ToF)
Time of flight technology is becoming more popular because it can produce a 3D X,Y,Z image with a single snapshot. The 3D images are obtained by measuring the time it takes for light to travel from the emitter to the receiver. Hence the name time of flight. This technology is used for large objects that are relatively far from the camera. Therefore the measurement phase requires high precision electronics in order to measure at the speed of light.
PROS:
- 3D image. A 3D volumetric image is obtained by capturing only one picture. Here the image is produced by measuring the phase angle between the emission and reception.
- Used in robot bin picking, gaming, people counting, navigation. Because of its ability to identify large objects in space, this technology is well suited for robotic bin picking and sorting for applications to guide the robot in the 3 axes.
CONS:
- Secondary reflections and ambient light. Vulnerable to ambient light because light interference is possible.
- Movement. Movement of the scene will create grossly distorted images.
- Dynamic range is relatively low. Some bright or low light scenes will produce many missing or outlier points.
- Very poor Z depth resolution. Normally these systems offer a 1 cm Z resolution. Some systems are now getting better but there is still some work to do. This is normal because of the short time light takes to go from LED light output to the object and then be reflected back to the sensor. All this takes a fraction of a second and electronics must be very fast to compute.
The bottom line
These four technologies all have pros and cons, and the choice about which technology is the best suited largely depends on what type of application and how it will be used. In summary, for high resolution and precision, structured light and laser triangulation are usually preferred and for less resolution for object identification or location, bin picking and sorting, Time of Flight (ToF) or Stereo are preferred.
Written by Raymond Boridy, product manager at Teledyne DALSA.