













Today's ever increasing proliferation of information, real-time data feeds and overwhelming sensor coverage, can often make the world feel small and constrained. However, the oceans and seas contain some of the world's most unexplored and uncharted regions, and hold valuable physical and informational resources for the planet's population. As well as the obvious mineral wealth, knowledge regarding the health and well-being of the underwater environment will become critical information over the coming years. Understanding and monitoring fish stocks, mapping the sea floor and assessing the health of the ecosystem, whilst noting the impact of human activity are becoming an increasing concern for both public and commercial bodies.
In 2014 the European Commission launched Horizon 2020, the largest ever Research and Innovation programme, with a focus on securing global competitiveness in Europe and a key programme to explore new opportunities in the marine and maritime sectors. In response to the call the UTOFIA consortium was formed with the aim of utilising state of the art photonic and imaging hardware to provide a new type of underwater imaging platform. The consortium has seven partners providing input ranging from high-power laser technology, time-of-flight imaging, advanced image processing, as well as the design of subsea capable systems and expertise in the monitoring of marine environments.
The foundation of the UTOFIA project is to leverage recent advances in time-of-flight imaging and laser technology to assemble a series of camera systems, providing high contrast underwater imaging together with 3D information, at a cost which allows many more users access to the technology. The subsea environment is particularly challenging for camera systems; water absorbs a significant proportion of visible light, with a minimum in the blue region around 420 nm and increasing strongly toward infrared wavelengths. Even more serious is the presence of small particles in muddy or turbid waters, which scatter light, and can render artificial illumination sources useless as light is back-scattered into the camera, causing unacceptable 'glare' in the image. These difficulties are addressed within the project by adapting the features of a time-of-flight camera to work as range-gated camera, and couple the imaging system with a high-power laser source.
What is range-gating?
Range-gating is a technique where pulses of light are used to illuminate a scene, similar to a conventional camera flash, but synchronised with the exposure period of the camera. With precise timing, and only opening the camera exposure after the pulse has been emitted, the camera will only capture light reflected from objects further away than a certain distance from the camera. In effect, different 'slices' of the scene are imaged with each 'slice' corresponding to a different distance from the camera. This principle can be used to either remove the effects of scattered light near, or extract 3D information from the scene.

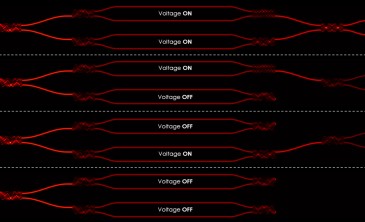
A typical experimental range-gated delay sweep for a single pixel showing the response as the pulse is delayed from behind the object (1) to the strongly backscattering area (5).
3D information can be extracted from range-gated systems, by 'sweeping' the gate delay through a continuous series of delays. In this way different distances from the camera are gradually revealed and the information can be used to reconstruct a 3D map of the scene. The image shows an illustration of this effect with several significant points highlighted on an actual experimental range sweep.

3D reconstruction of fish swimming in a test tank from range-gated imaging.
These traces are obtained by each pixel within the system at high speed, and are the raw data input used to feed 3D extraction algorithms, developed by project coordinator SINTEF, Norway. Several algorithms are under active development, with the most promising candidates being translated into FPGA routines operating in real time on the central camera module.
MOPA architecture: Compact and rugged
In order to provide illumination for the project, Bright Solutions Srl, Italy, developed an actively Q-switched laser source operating at 532 nm. This wavelength was chosen as the optimal trade-off between direct absorption from water and the increased scattering which occurs at shorter wavelengths. At the same time, high-power, few (1--2) nanosecond pulses at kilohertz repetition rates are required to get the range performance and resolution expected of the system. Compactness and ruggedness of the laser package must also be achieved.

This complex set of requirements was met by a completely new design of laser by Bright Solutions, incorporating a Master Oscillator Power Amplifier (MOPA) architecture, with 1064 nm output, frequency doubled to 532 nm. This approach enables a full control over relevant illuminator specifications of UTOFIA system, getting high-power and flexibility in operation, whilst the critical parameter of output jitter being effectively minimised.
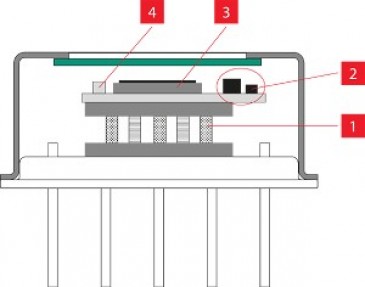
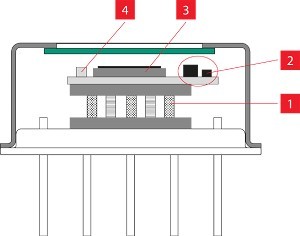
In tandem, Odos Imaging has adapted a time-of-flight camera to operate in a range-gated mode; controlling the laser pulses, synchronizing the camera exposure, and processing the captured images directly within the camera. Similarly to the laser source, reducing cost in the system by integrating as many functions as possible within a small number of hardware units is critical to lay a commercial foundation to a later product release.

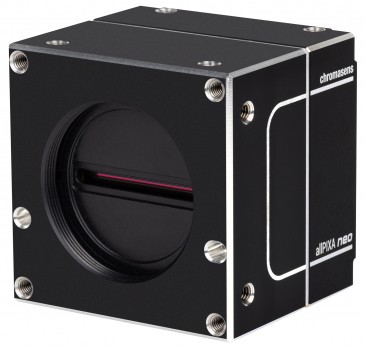
The second UTOFIA underwater camera system.
Of the three versions of the camera platform, designed and assembled by the SINTEF team, tests have been carried out in difficult turbid conditions in a Norwegian fjord in Oslo using the first version, where an improvement in viewing range of over 2x was achieved in comparison to a conventional camera. More detailed testing in laboratory conditions has further quantified the performance of the cameras in providing a tangible benefit to users. The second version of the system has been fully assembled and will be extensively tested in real life conditions in the Bay of Biscay during the winter of 2017, by partners Subsea Tech, France, and ATZI, Spain, with a final pre-production prototype planned for delivery during the last quarter of 2017.
Although the UTOFIA project is directly aimed at establishing excellence in the important and growing field of underwater sensing, the technology developed can be expected to find wider use in industry. The small size and high power of the MOPA source is attractive for several OEM applications, whilst the 'dual-use' of a time-of-flight camera for range-gating operation provides another route to extracting valuable 3D information from scenes.
Written by Chris Yates, CEO of ODOS Imaging.