














In March 2011, an earthquake struck off the Pacific coast of Tohoku measuring 9.0 on the Richter scale, setting off a powerful tsunami. Nearly 16,000 deaths were reported and hundreds of thousands of buildings damaged or destroyed. It also caused three reactors to fail at the Fukushima Daichi Nuclear Power Plant, leading to the release of radioactivity, which continues to this day. In the development of technologies and processes for dismantling the damaged reactors, a number of ground- and underwater-based robotic systems have been sent inside the containment vessels. However, damage and high radiation levels have limited access to information vital to decontamination and decommissioning efforts.

Recently the Southwest Research Institute (SwRI), based in San Antonio, Texas (US), was contracted by Tokyo Electric Power Company Holdings, Incorporated (TEPCO Holdings) to explore the use of UAS, or drones to assess conditions within the containment vessels at the Fukushima nuclear power station. Developing the drone that can handle the harsh conditions “is a formidable challenge,” said Project Manager Dr.Monica Garcia.
Working with the General Robotics, Automation, Sensing and Perception (GRASP) Lab at the University of Pennsylvania (Penn) School of Engineering and Applied Science, SwRI engineers are helping adapt small drones to autonomously operate within the containment. The challenge, according to Dr. Garcia, is that the containment vessels are still very highly radioactive. “This affects the electronic equipment, and the images are fuzzy,” she said. In addition, without the aid of GPS, the drones have to navigate around all sorts of obstacles inside the crumbling vessels. The interior is also dark and wet with dripping water, adding further challenges to capturing visible data.
The team successfully demonstrated the core feasibility of their approach in a test fixture at SwRI’s San Antonio campus late last year. During Phase 1 of the project, using off-the shelf components, the team verified that the UAS components could survive the harsh radiation conditions within the containment vessels.
“As robots get smaller, faster, and smarter, this is exactly the kind of problem we want them to address,” said Dr. Vijay Kumar, the Nemirovsky Family Dean of Penn’s School of Engineering and Applied Science. “Challenges like this are what push research in our field forward.”

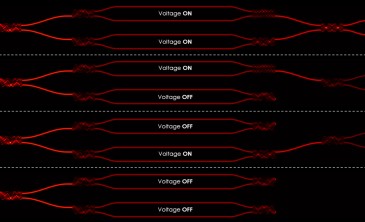
The team developed an enclosed obstacle course to simulate the potential conditions inside the containment at Fukushima Daiichi. The photo on the left shows the UAS autonomously traveling around an obstacle in the test fixture. The image on the right depicts the original (purple line), actual (blue circles), and upcoming (green circles) flight paths as it travels around the obstacles (red blocks).
Written by Anne Fischer, Managing Editor, Novus Light Technologies Today