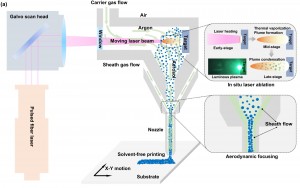


















A collaboration between international and Vanderbilt University researchers is helping to update a tried-and-true medical technology for the 21st century. The development of an intelligent and autonomous Magnetic Flexible Endoscope holds the promise of making colonoscopies safer, less painful, more widely available and less expensive.
The article “Enabling the future of colonoscopy with intelligent and autonomous magnetic manipulation” was published in the journal Nature Machine Intelligence on Oct. 12.
Despite tens of millions of colonoscopies performed in the U.S. and Europe annually—and the procedure’s well documented success in detecting early stage colorectal cancer, colitis and Crohn’s disease—nothing much about the uncomfortable and complex procedure has improved in over 50 years. Patients worry about the pain and sedation that accompany the procedure, and only a small number of physicians undergo extensive training to learn how to properly manipulate the complex and non-ergonomic colonoscopy systems.
video
Keith Obstein, associate professor of medicine and mechanical engineering, and Pietro Valdastri, former Vanderbilt assistant professor of mechanical engineering and current chair in robotics and autonomous systems at University of Leeds, have spent over a decade with various graduate and postdoctoral researchers developing the MFE.
The researchers determined that the best way to redesign the system was to create a mechanism that pulls, rather than pushes, the endoscope to its target location using magnets. Obstein explains that by adding an internal magnet at the front end of the device—also the location of the camera and therapeutic channels—and a magnet attached to a robotic arm outside of the body, the endoscope can be manipulated to an accuracy of five millimeters and six degrees in real time.
In a series of experiments, they determined that both novice and experienced operators could perform semi-autonomous navigation colonoscopies—where the operator and robotic processes work together—efficiently and with little frustration.
“This work opens new paradigms in how we think about teaching and accessibility of complex medical procedures, beyond colonoscopies. With the deployment of autonomous and intelligent medical devices, this work becomes safer for operators and more patient-centric,” Valdastri said. It also holds the promise of increasing the availability of early-stage cancer treatments.

Schematic overview of the control layers associated to autonomy levels. In the first layer, where no autonomy is available, the user manually controls the robot end effector in 5 degrees of freedom (DOF) in an attempt to manipulate the MFE. In the second layer, the user controls the endoscope and the system carries out suitable motions of the robot by taking into consideration localization information and magnetic field interaction. In the third layer, the user has discrete control over the endoscope, the lumen is detected and followed autonomously.
A bulk of the work was conducted within the Vanderbilt Institute of Surgery and Engineering. “VISE has been instrumental in helping to orchestrate our collaboration and continued engagement between clinicians and engineers. Many of the relationships that Pietro and I have cultivated with our partners is thanks to the Institute’s spirit of innovation and collaboration,” said Obstein, also a faculty affiliate at VISE.
With more than 24 publications and four patents filed to date, Obstein and Valdastri will compare the MFE procedure against conventional colonoscopies through human trials in 2021.
Image at top: Overview of the robotic Magnetic Flexible Endoscope system. The magnetic endoscope (bottom right) is equipped with an endoscopic camera, an insufflation channel, and a working channel. Illumination is provided by an LED. A KUKA LBR Med robotic arm is used to manipulate an external permanent magnet. The endoscopic video feed is projected on a monitor with a graphical interface showing parameters such as relative robot speed and inter-magnetic distance.Image.